About Me
I am a final-year PhD candidate at CIIRC, CTU in Prague, working on learning robotic manipulation skills from human instructional videos. My work focuses on extracting structured information from videos and applying it in the robot learning frameworks and planning algorithms. Currently, I am seeking a postdoc or research scientist role in robotics, AI, or embodied intelligence.
- Robotics
- Learning from video
- Manipulation task-and-motion planning
PhD Artificial Intelligence
CIIRC, CTU, Prague, Czech Republic
MSc Data Science
Ukrainian Catholic University, Lviv, Ukraine
BSc Computer science
IASA of the NTU "Igor Sikorsky Kyiv Polytechnic Institute", Kyiv, Ukraine

We present a factor graph-based method to enforce temporal consistency in single-view RGB object pose estimation for robot control. By incorporating motion models, estimating measurement uncertainty, and performing online optimization, our approach improves pose stability and robustness. We validate its effectiveness on benchmarks and in real-time feedback control with a camera-mounted robot arm.
Jan 1, 2025
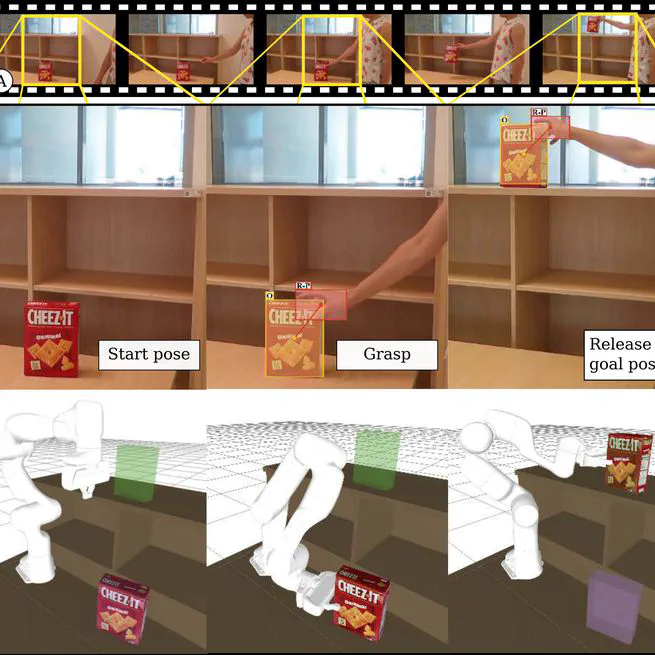
We introduce a video-guided planner that extends RRT using grasp and release states from instructional videos to solve complex, sequential tasks. Our method generalizes beyond the video scene and is validated on the real robot across three different tasks.
May 29, 2023
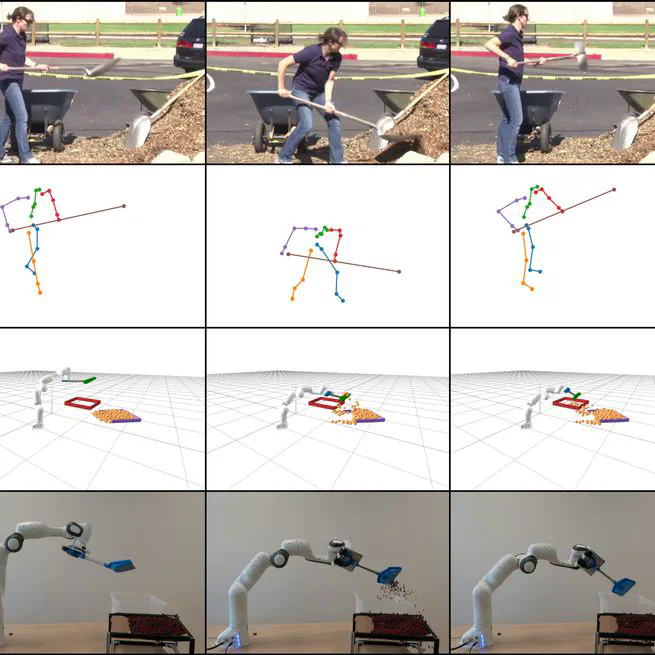
We propose a method for learning tool manipulation from unconstrained videos, removing the need for expert demonstrations. Our approach aligns the simulated environment with the video scene and uses tool-centric imitation learning to derive robot control policies. We validate the method on tools like a spade, scythe, and hammer, and demonstrate real-world success with a spade on a Franka Emika Panda robot.
Jan 1, 2022
Experience
Visiting Researcher
INRIA, Paris, FranceWorked with Justin Carpentier and Wilson Jallet on estimating the 3D human pose from video and integrating it into the optimal control pipeline. The work included processing 2D video frames with SOTA methods, developing the evaluation metrics, developing custom costs for OCP setup and comparing with baselines.Teaching Assistant
CTU, Prague, Czech RepublicCourses taught: Advanced Robot Kinematics (2020-2025); Geometry of Computer Vision and Graphics 2021.Data Scientist
N-IX, Lviv, UkraineDesigned a prototype for optimizing rebalancing routes for vehicles based on bike demand prediction, automated workflows for the finance department, and developed reporting dashboards for an electric bike client.Data Scientist Intern
Scotiabank, Toronto, CanadaDeveloped machine learning models for customer lifetime value prediction using transactional data, as part of my master’s thesis project.
Education
PhD Artificial Intelligence
CIIRC, CTU, Prague, Czech RepublicThesis: Learning Robotic Skills from Human Video Demonstrations Supervisors: Josef Sivic, Vladimir PetrikMSc Data Science
Ukrainian Catholic University, Lviv, UkraineThesis: Building segment-based revenue prediction for CLV model Supervisor: Oleksandr RomankoBSc Computer science
IASA of the NTU "Igor Sikorsky Kyiv Polytechnic Institute", Kyiv, Ukraine