
Temporally Consistent Object 6D Pose Estimation for Robot Control
We present a factor graph-based method to enforce temporal consistency in single-view RGB object pose estimation for robot control. By incorporating motion models, estimating measurement uncertainty, and performing online optimization, our approach improves pose stability and robustness. We validate its effectiveness on benchmarks and in real-time feedback control with a camera-mounted robot arm.
Jan 1, 2025
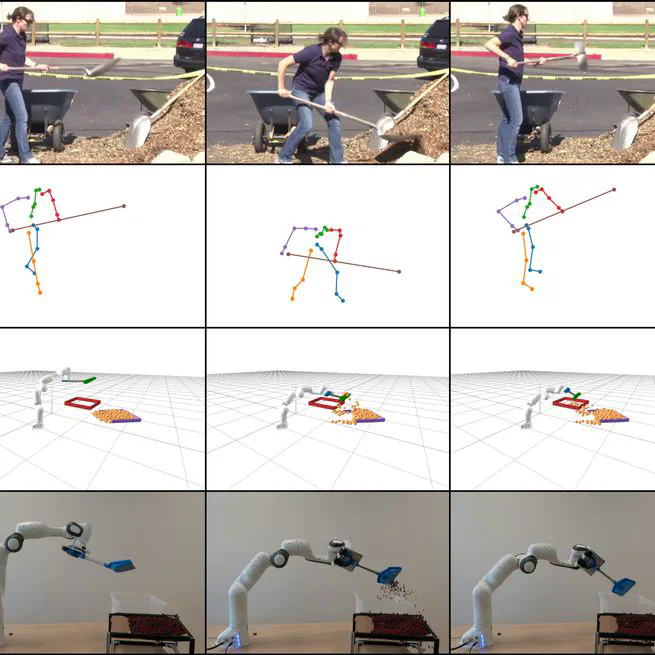
Learning to Manipulate Tools by Aligning Simulation to Video Demonstration
We propose a method for learning tool manipulation from unconstrained videos, removing the need for expert demonstrations. Our approach aligns the simulated environment with the video scene and uses tool-centric imitation learning to derive robot control policies. We validate the method on tools like a spade, scythe, and hammer, and demonstrate real-world success with a spade on a Franka Emika Panda robot.
Jan 1, 2022