Multi-Contact Task and Motion Planning Guided by Video Demonstration
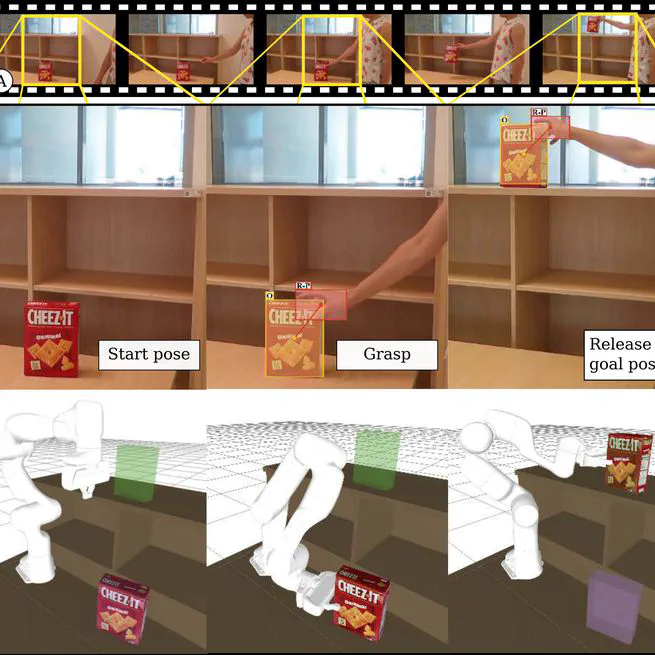
We introduce a video-guided planner that extends RRT using grasp and release states from instructional videos to solve complex, sequential tasks. Our method generalizes beyond the video scene and is validated on the real robot across three different tasks.
May 29, 2023