Learning to Manipulate Tools by Aligning Simulation to Video Demonstration
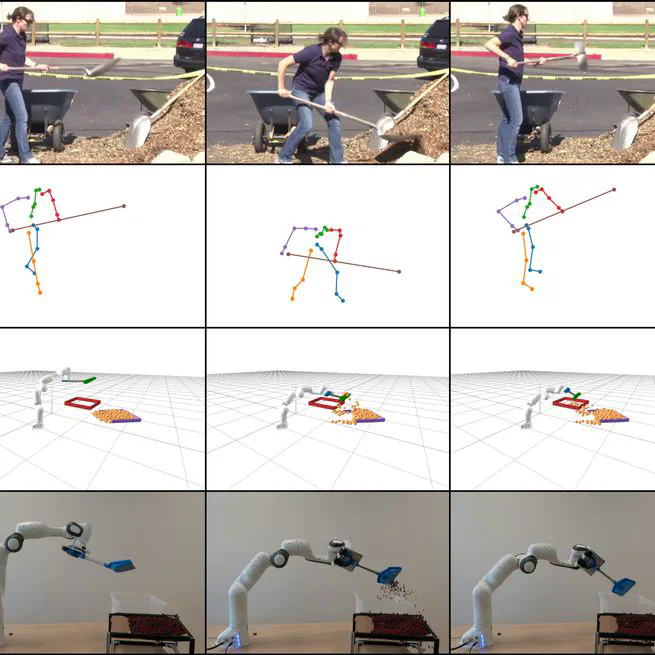
We propose a method for learning tool manipulation from unconstrained videos, removing the need for expert demonstrations. Our approach aligns the simulated environment with the video scene and uses tool-centric imitation learning to derive robot control policies. We validate the method on tools like a spade, scythe, and hammer, and demonstrate real-world success with a spade on a Franka Emika Panda robot.
Jan 1, 2022